Large motors are not very polite when they start.
The moment a three-phase motor starts directly on line, it can draw a very high starting current. Sometimes several times higher than its normal running current. For small motors, this may not be a big drama. But with larger motors, that starting current can create voltage drops, stress the electrical network, heat the motor windings, and reduce the long-term life of the equipment.
That is why the star-delta starter, also written as Y-Δ starter, is still used in many industrial motor control panels.
It is a classic starting method. Old-school, yes. But still useful.
What Is a Star-Delta Starter?
A star-delta starter is a motor starting method used to reduce the starting current of a three-phase induction motor.
The motor first starts with its windings connected in star, also called Y connection. After a short time delay, the connection changes automatically to delta, also called Δ connection.
The basic idea is:
Start gently in star.
Run normally in delta.
During star connection, the voltage across each motor winding is reduced. Because of that, the starting current is lower than it would be in direct delta connection. Once the motor has accelerated, the circuit changes to delta connection so the motor can run at full voltage and produce normal torque.
Simple sentence. A lot happening behind it.
Why Use Star-Delta Starting?
The main reason for using star-delta starting is to reduce starting current.
When a motor starts, it is not yet rotating at normal speed. At that moment, it can draw a very high current from the supply. This high current can cause:
- Voltage drop in the electrical network
- Stress on motor windings
- Stress on contactors and cables
- Mechanical shock on the driven load
- Disturbance to other equipment
- Increased heating during startup
- Reduced motor lifetime if starts are frequent
A star-delta starter reduces this starting current by first connecting the motor windings in star.
However, there is a trade-off.
In star connection, the motor also produces lower starting torque. That means star-delta starting is not suitable for every load.
It works best when the motor can start with reduced torque, such as some fans, pumps, blowers, lightly loaded conveyors, and similar applications.
It is not ideal for heavy-load starts where the motor needs full torque immediately.
Automation always has this little bargain: lower current, lower torque. No free lunch.
Star and Delta Winding Connections
A three-phase motor suitable for star-delta starting has six winding terminals.
These terminals allow the motor windings to be connected in either star or delta configuration.
In star connection, one end of each winding is connected together to form a common star point. The three supply phases are connected to the other ends of the windings.
In delta connection, the windings are connected end-to-end in a closed triangle. Each supply phase is connected to one corner of the triangle.
The same motor windings are used in both cases.
Only the connection changes.
In a simple manual wiring arrangement, metal bridges can be used in the motor terminal box to connect the motor permanently in star or delta. But in an automatic star-delta starter, those connections are made by contactors.
That is where the control circuit comes in.
Main Components of a Star-Delta Starter
A basic star-delta starter normally includes:
- Main contactor
- Star contactor
- Delta contactor
- Thermal overload relay
- Timer relay
- START push button
- STOP push button
- Auxiliary contacts for interlocking
- Fuses or circuit breaker
- Motor with six accessible winding terminals
Let’s name the contactors in a simple way:
- C1 = main contactor
- C2 = delta contactor
- C3 = star contactor
The exact names may vary in different diagrams, but the function is usually the same.
C1 connects the motor to the power supply.
C3 creates the star connection during startup.
C2 creates the delta connection during normal running.
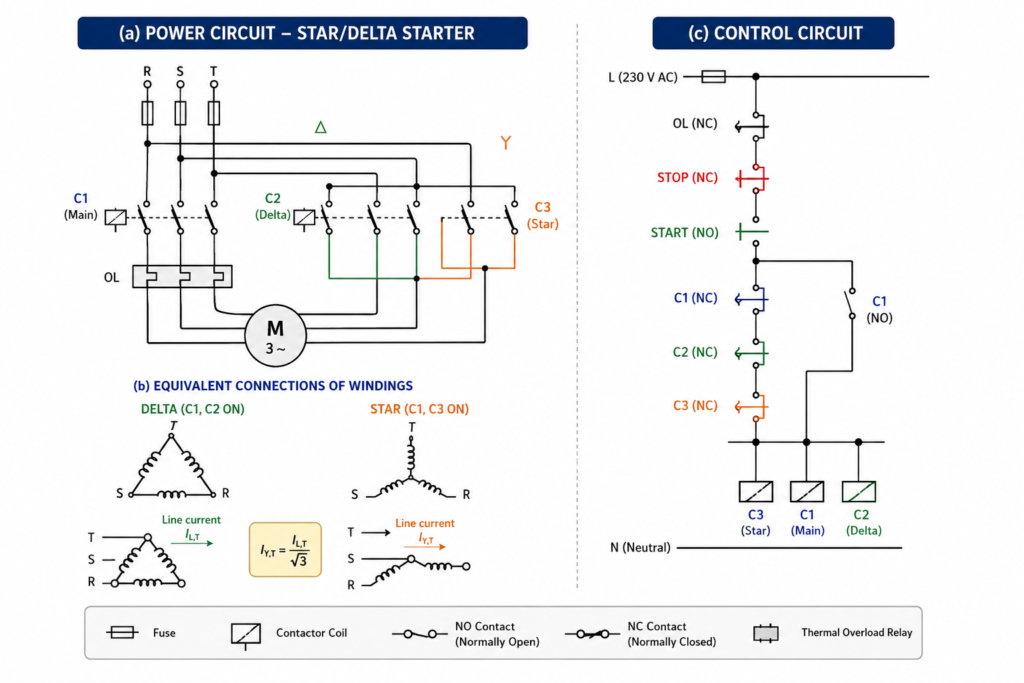
Power Circuit of a Star-Delta Starter
In the power circuit, the main contactor feeds the motor terminals from the three-phase supply.
The star and delta contactors change how the motor windings are connected.
During startup:
- Main contactor C1 is energized
- Star contactor C3 is energized
- Delta contactor C2 is off
This connects the motor windings in star.
After the preset time delay:
- Star contactor C3 switches off
- Delta contactor C2 switches on
- Main contactor C1 remains energized
This connects the motor windings in delta.
The motor then continues running in normal operating condition.
The important point is that star and delta contactors must never be energized at the same time.
If C2 and C3 close together, the motor terminals can be shorted. That can cause a serious fault, blown fuses, tripped breakers, damaged contactors, or worse.
So interlocking is not optional.
It is survival.
Control Sequence of Star-Delta Starting
The control sequence follows a very specific order.
When the operator presses START, the star contactor must energize first. Then the main contactor energizes and the motor starts in star connection.
After the time delay expires, the star contactor drops out. Then, after a very short transition pause depending on the design, the delta contactor energizes.
The sequence is:
- Operator presses START.
- Star contactor C3 energizes.
- Main contactor C1 energizes.
- Motor starts in star connection.
- Timer begins counting.
- After time T, star contactor C3 de-energizes.
- Delta contactor C2 energizes.
- Motor continues running in delta connection.
- Main contactor C1 remains energized during the whole running period.
- Pressing STOP de-energizes the control circuit and stops the motor.
This timing must be correct.
If delta engages too early, the motor may still draw too much current. If star remains active too long, the motor may run with reduced torque and fail to accelerate properly.
There is a sweet spot, and the timer needs to be adjusted for the motor and load.
Why the Timer Is Needed
The change from star to delta cannot happen randomly.
The motor needs enough time to accelerate in star before changing to delta. This time depends on several things:
- Motor power
- Load type
- Mechanical inertia
- Supply voltage
- Starting conditions
- Required acceleration time
- Application type
A small lightly loaded motor may need only a short star time. A larger motor with more inertia may need a longer delay.
The timer relay controls this delay.
In many classic star-delta circuits, a pneumatic or electronic timer is connected with the main contactor. In modern panels, an electronic star-delta timer is very common. Some PLC-controlled systems handle the timing in software.
No matter how the timer is implemented, its job is the same:
Keep the motor in star long enough to accelerate, then change it to delta.
Not too soon. Not too late.
Star Connection During Starting
During the star stage, the motor winding voltage is reduced.
This reduces the starting current drawn from the supply. The motor starts more gently compared with direct-on-line starting.
This is useful because the electrical network sees a smaller current demand during startup. It also reduces stress on contactors, cables, and the motor windings.
But again, the motor torque is also reduced.
This means the load must be light enough for the motor to accelerate in star.
If the motor cannot accelerate properly in star, it may remain slow, draw current for too long, overheat, or trip the overload when switching to delta.
That is a common star-delta problem.
People see lower starting current and forget about lower starting torque. The machine does not forget.
Delta Connection During Normal Running
After the timer finishes, the motor changes to delta connection.
In delta, each motor winding receives full line voltage. The motor can now produce normal rated torque and run at its normal operating condition.
This is the running state.
For most standard star-delta applications, the motor should not remain in star during normal operation. If it does, the motor may not deliver the expected torque and may behave incorrectly under load.
The delta contactor is therefore not just optional. It is what puts the motor into its proper running connection.
Star is for starting.
Delta is for running.
Open Transition Star-Delta Starting
Many basic star-delta starters use open transition switching.
This means the star contactor opens first, and then the delta contactor closes after a short break.
During that brief moment, the motor is disconnected from the supply.
This is simple and common, but it can create a current and torque transient when the motor reconnects in delta.
For many applications, this is acceptable.
For more sensitive or high-power systems, other starting methods may be preferred, such as closed transition star-delta, soft starters, or variable frequency drives.
But for basic industrial motor starting, open transition star-delta is still widely used.
Interlocking Between Star and Delta Contactors
The star and delta contactors must be interlocked.
There are two common interlocking methods:
- Electrical interlocking
- Mechanical interlocking
Electrical interlocking uses normally closed auxiliary contacts.
For example:
- A normally closed auxiliary contact of the delta contactor is placed in series with the star contactor coil.
- A normally closed auxiliary contact of the star contactor is placed in series with the delta contactor coil.
This prevents one contactor from energizing while the other is active.
Mechanical interlocking physically prevents the two contactors from closing together.
Both are important.
Because if star and delta contactors close at the same time, you do not get “extra starting power.”
You get a short circuit.
And probably a loud one.
Thermal Overload Protection
A star-delta starter must include motor overload protection.
A thermal overload relay is usually installed in the power circuit to monitor motor current. Its normally closed auxiliary contact is wired into the control circuit.
If the motor overloads, the overload relay trips. Its NC contact opens, de-energizing the contactor control circuit. The main contactor drops out and the motor stops.
The overload relay protects against conditions such as:
- Mechanical overload
- Bearing failure
- Blocked pump
- Jammed fan
- Overloaded conveyor
- Phase loss
- Motor running above rated current
- Too frequent starting
The overload setting and placement must be selected correctly for star-delta operation. Depending on where the overload relay is installed in the power circuit, the setting rules may differ.
That detail matters. Always follow the starter design and motor protection instructions.
START and STOP Buttons
The manual control of a star-delta starter usually includes a START and STOP button.
The STOP button is normally closed and placed in series with the control circuit. Pressing STOP opens the circuit and de-energizes all active contactors.
The START button is normally open. Pressing START begins the starting sequence.
Most star-delta control circuits include latching. That means after pressing START, the main contactor remains energized through its own auxiliary contact until STOP is pressed or a fault occurs.
This gives normal maintained operation.
Press START once.
Motor starts in star.
Timer switches to delta.
Motor keeps running.
Press STOP.
Motor stops.
Minimum Contact Implementation
There are many ways to design a star-delta control circuit.
Some circuits use the minimum number of contacts needed to achieve the sequence. Others use more auxiliary contacts for clearer interlocking, indication, safety, or compatibility with specific contactor and timer products.
In basic form, the circuit must ensure:
- Star contactor energizes at startup
- Main contactor energizes and remains energized
- Timer starts with the main contactor
- Star contactor drops out after the delay
- Delta contactor energizes after star drops out
- Star and delta cannot energize together
- STOP button stops the sequence
- Overload trip stops the motor
Different manufacturers and panel builders may draw the circuit differently, but the required logic remains the same.
If the sequence is right and interlocking is safe, the circuit principle is correct.
When Star-Delta Starting Is Suitable
Star-delta starting is suitable when the motor can start with reduced torque.
Typical applications include:
- Fans
- Centrifugal pumps
- Blowers
- Lightly loaded conveyors
- Some compressors
- Machinery with low starting load
- Applications where reduced starting current is required
It is usually best when the machine load does not require high torque at zero speed.
For example, a fan often has lower starting load and torque demand increases as speed rises. That can suit star-delta starting.
A heavily loaded conveyor starting under full load may not suit it.
If the motor struggles in star, the method is wrong for the application.
When Star-Delta Starting Is Not Suitable
Star-delta starting is not ideal for loads requiring high starting torque.
Poor applications may include:
- Crushers
- Loaded conveyors
- Heavy mixers
- Positive displacement pumps
- Loaded compressors
- Machines with high breakaway torque
- Applications requiring smooth controlled acceleration
- Systems with frequent starts and stops
In these cases, a soft starter or variable frequency drive may be a better choice.
A soft starter can reduce current while controlling voltage ramp more smoothly.
A VFD can control both voltage and frequency, giving much better speed and torque control.
Star-delta is simple and affordable, but it is not a miracle cure.
Common Problems in Star-Delta Starters
Star-delta circuits can fail in several predictable ways.
Common problems include:
- Motor does not start
- Motor starts in star but trips when changing to delta
- Star contactor does not energize
- Delta contactor does not energize
- Timer not working
- Star and delta contactors interlocking incorrectly
- Motor hums but does not rotate
- Overload trips during starting
- Overload trips after transition to delta
- Contactors chatter
- Motor runs only in star
- Motor never changes to delta
Possible causes include:
- Wrong timer setting
- Faulty timer contact
- Bad auxiliary contact
- Incorrect wiring
- Wrong motor terminal connection
- Mechanical overload
- Low supply voltage
- Failed contactor coil
- Thermal overload trip
- Phase loss
- Star and delta wiring mistake
Star-delta troubleshooting is mostly about checking sequence.
Does star close first?
Does main close?
Does timer run?
Does star open?
Does delta close?
Does overload stay healthy?
Follow that order and the fault usually shows itself.
Star-Delta Starter vs Direct-On-Line Starter
A direct-on-line starter connects the motor directly to the supply in its normal running connection.
It is simple, but starting current is high.
A star-delta starter reduces starting current by starting in star and then switching to delta.
Comparison:
| Feature | Direct-On-Line Starter | Star-Delta Starter |
|---|---|---|
| Starting current | High | Reduced |
| Starting torque | High | Reduced |
| Circuit complexity | Simple | More complex |
| Number of contactors | Usually one | Usually three |
| Timer needed | No | Yes |
| Suitable for large motors | Sometimes limited | Often better |
| Good for heavy starts | Yes, if supply allows | Not always |
| Cost | Lower | Higher than DOL |
Direct-on-line is simple and strong.
Star-delta is gentler on the supply but weaker during starting.
Choose based on the motor, load, and electrical network.
Star-Delta Starter vs Soft Starter and VFD
Star-delta starters are older and simpler than soft starters and variable frequency drives.
A soft starter reduces starting current by gradually increasing voltage to the motor. It gives smoother acceleration than star-delta in many applications.
A VFD controls both voltage and frequency. It can control speed, acceleration, deceleration, torque, and energy use.
Comparison:
| Feature | Star-Delta | Soft Starter | VFD |
| Reduces starting current | Yes | Yes | Yes |
| Controls speed | No | No, not normally | Yes |
| Smooth acceleration | Limited | Good | Excellent |
| Torque control | Limited | Better | Best |
| Cost | Lower | Medium | Higher |
| Complexity | Moderate | Medium | Higher |
| Best use | Simple reduced-current start | Smooth motor starting | Full speed control |
Star-delta is still useful when only reduced starting current is needed and the load is suitable.
For better control, soft starters and VFDs are often preferred.
Important Safety Notes
Star-delta starters involve three-phase power and motor control circuits. Wiring mistakes can be dangerous.
Important safety points include:
- Use correct fuses or circuit breakers
- Use proper motor overload protection
- Confirm motor is suitable for star-delta starting
- Check motor terminal markings carefully
- Use mechanical and electrical interlocking
- Never allow star and delta contactors to close together
- Set the timer correctly
- Verify rotation direction
- Check current during starting and running
- Follow electrical standards and manufacturer instructions
A star-delta starter is not just three contactors thrown into a panel.
It is a sequence. And the sequence must be right.
Final Thoughts
A star-delta starter reduces the starting current of a three-phase motor by starting the motor in star connection and then switching it to delta connection after a time delay.
During star starting, the winding voltage is reduced, so the starting current is lower. But the starting torque is also lower. After the motor accelerates, the starter changes to delta so the motor can run at normal voltage and deliver rated torque.
A proper star-delta system uses three contactors: main, star, and delta. It also needs a timer, overload protection, START and STOP buttons, and safe interlocking between star and delta contactors.
The most important rule is simple:
Star and delta contactors must never be energized at the same time.
Used correctly, star-delta starting is a practical and cost-effective method for reducing motor starting current. Used in the wrong application or wired badly, it becomes a source of trips, weak starting, and possible electrical faults.
Start in star. Run in delta. Interlock everything.
That is the heart of the Y-Δ motor starter.